- 용도
- 주요 사양
- Ethernet Of Coaxial 을 사용한 통한 Ethernet 기술 적용
- Roboto Control Main Processor : STM32F469I
- Remote Contorlled Motor Driver (PWM Speed Control)
- Pan Tilting Zoom Camera System Control
- Embedded Single Board Computer Control Box @ Linux + QT
- 개발 내용
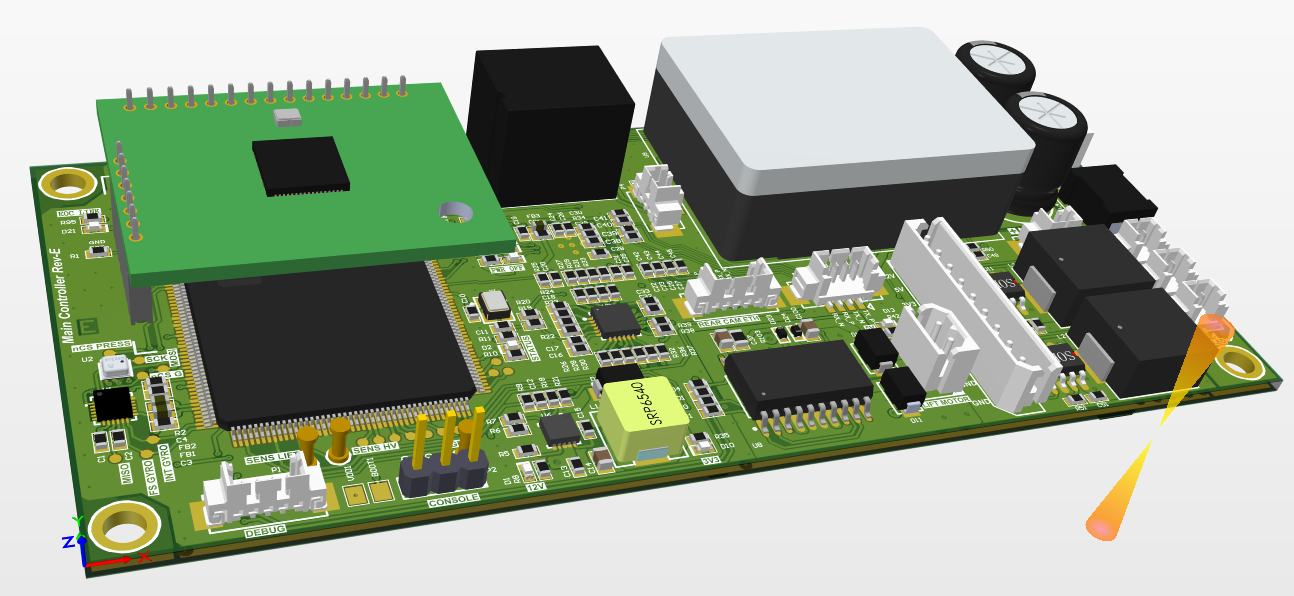
- Main Control Board (Ethernet Based)
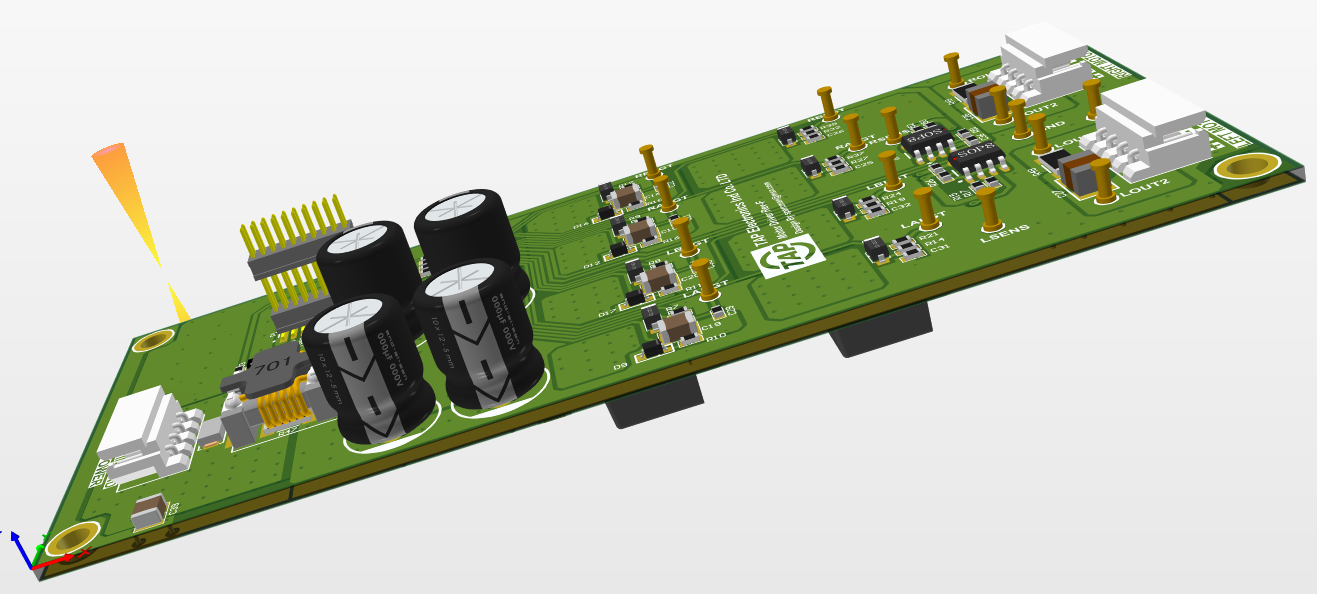
- 2 Ch High Voltage Motor Driver (Driving Motor)
- Camera Motor Controleller(PZT)
- Remote Firmware Update Function & Remote Monitoring Program





|